Encoder Arduino code using Arduino Nano
#include <SPI.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <Wire.h>
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 32 // OLED display height, in pixels
// Declaration for an SSD1306 display connected to I2C (SDA, SCL pins)
#define OLED_RESET 4 // Reset pin # (or -1 if sharing Arduino reset pin)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET);
const byte interrupt = 2;
const byte interruptB = 3;
const int encoder1PinA = 2; // encoder channel A,B (interupt pins)
const int encoder1PinB = 3;
float Pos1deg = 0;
volatile float encoder1Pos = 0; //ticks of encoder will change, initial number is zero
void setup()
{
Wire.setClock(400000);
// Serial.begin(9600);
if (!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // Address 0x3C for 128x32
//Serial.println(F("SSD1306 allocation failed"));
for (;

; // Don't proceed, loop forever
}
attachInterrupt(0, runEncoder1, RISING ); // encoder pin on interrupt 0 >>(pin 2 on arduino)
}
void loop()
{
float Pos1;
uint8_t oldSREG = SREG;
cli();
Pos1 = encoder1Pos;
SREG = oldSREG;
static int oldPos1;
if (Pos1 != oldPos1) {
oldPos1 = Pos1;
}


 LinkBack URL
LinkBack URL About LinkBacks
About LinkBacks



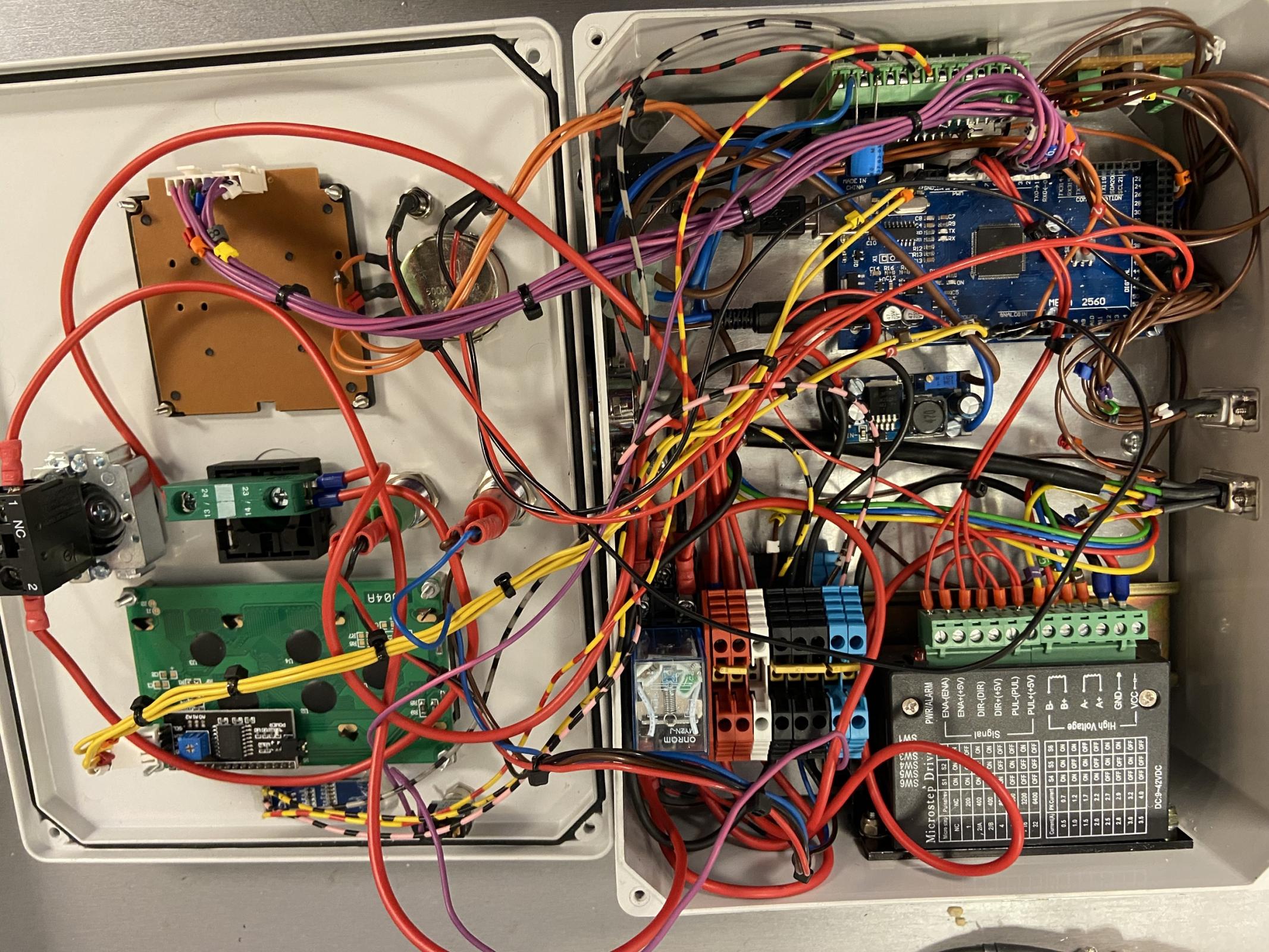
Needs a little tidying
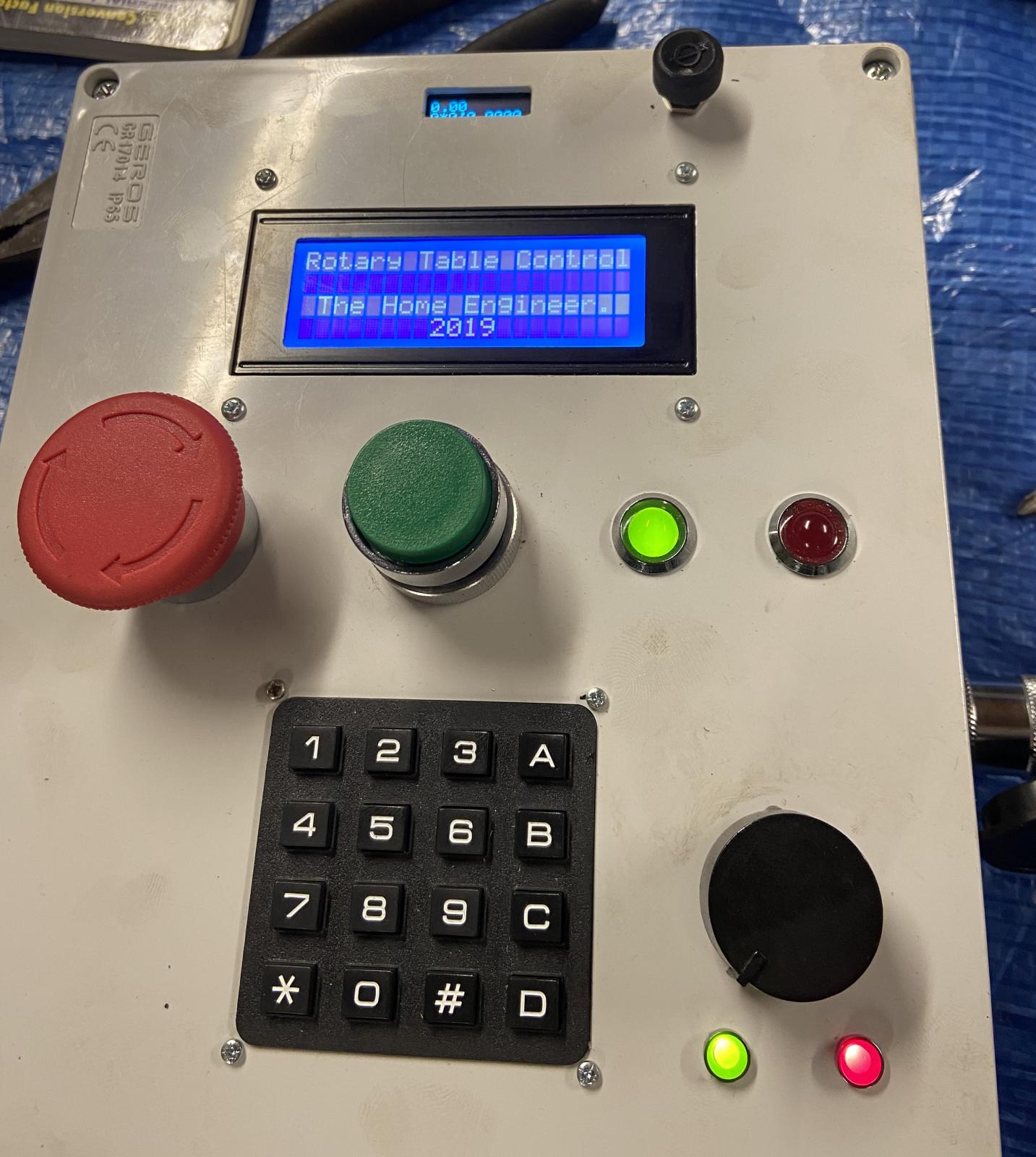
Start up
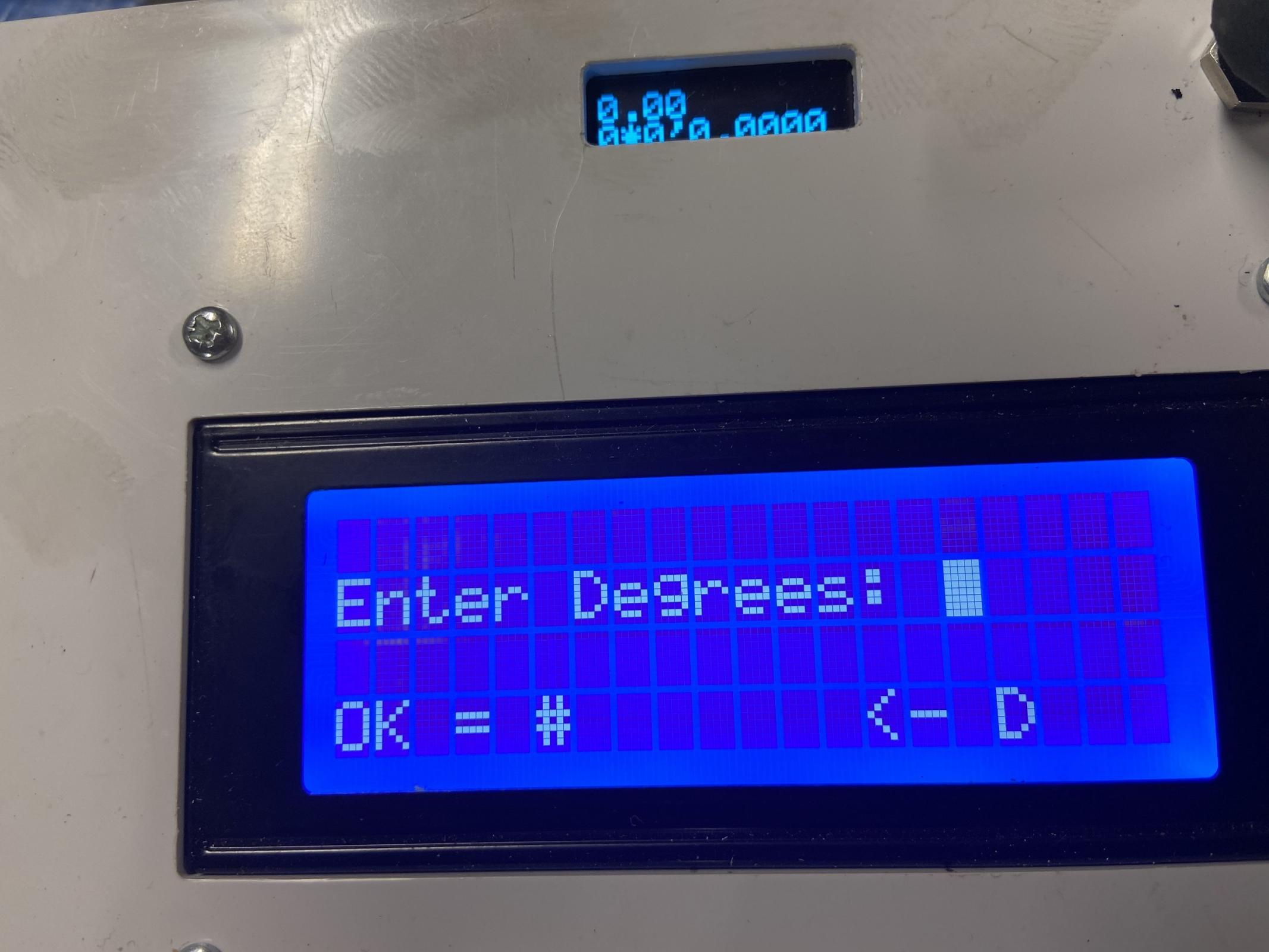
Options that can be selected
Degrees selected
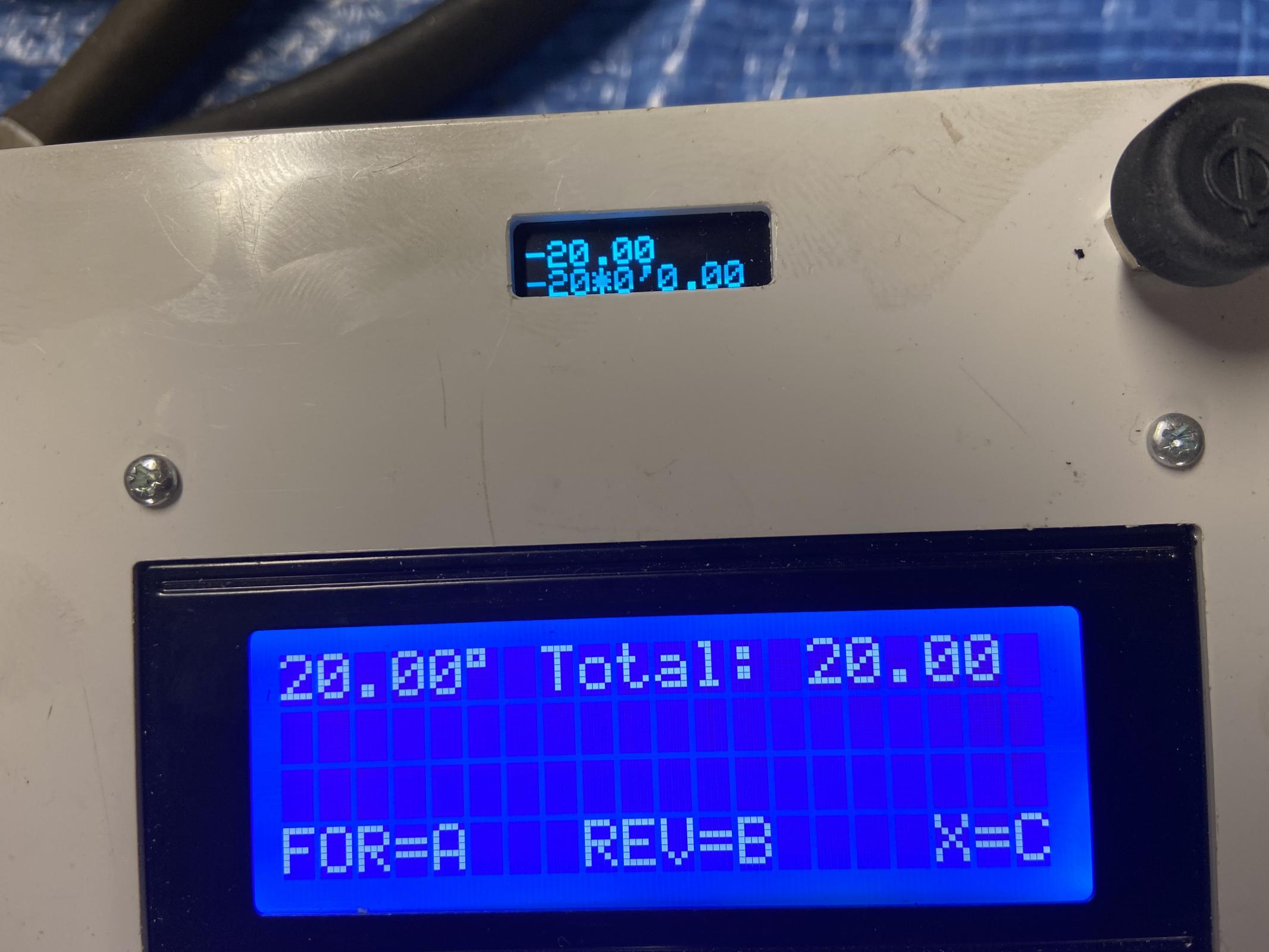
Selection set to 20 degrees and ready to move table.
Angle travelled and small top screen shows position via encoder. Very pleased with accuracy.
Aluminium adaptor plate to connect stepper motor to table

Motor and encoder in place
It has been very interesting and frustrating at the same time, but as previously mentioned without the help of a very clever electronics apprentice where I work, I would have struggled to complete this project. So a massive thank you to him.







 Reply With Quote
Reply With Quote







Bookmarks